Blog Details
- Member
- February 28, 2026
Modular Tracking Movable Solar unit
Benefits
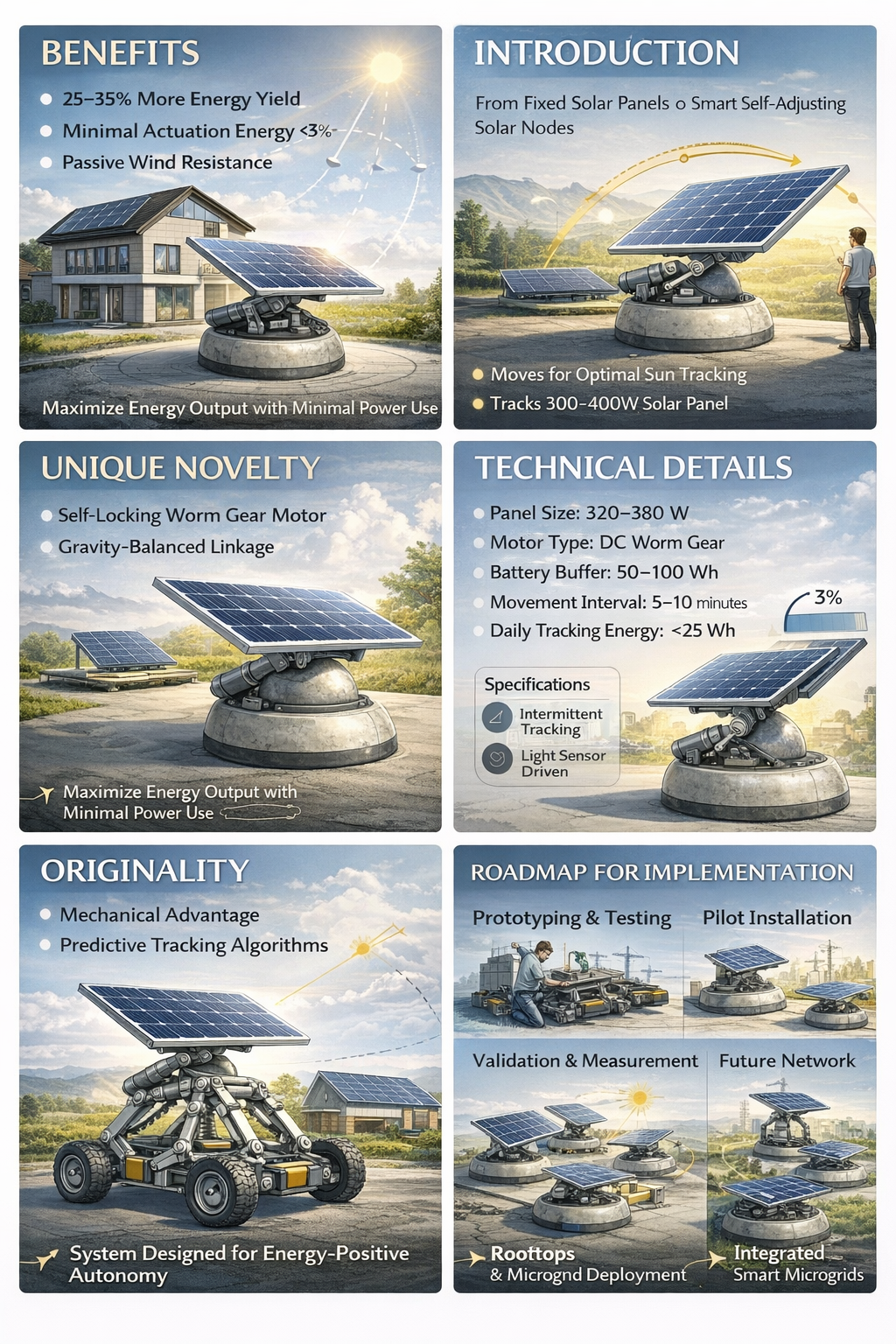
The proposed hemispherical movable solar unit introduces a new approach to distributed solar generation by significantly improving energy yield without proportionally increasing system complexity or power consumption. By enabling controlled solar tracking, the system can enhance daily energy generation by nearly 25–35% compared to fixed installations, especially in space-constrained rooftops and decentralized energy environments. The design minimizes active energy usage, ensuring that the power consumed in movement remains a very small fraction of the energy produced. This results in higher energy autonomy, improved return on investment, and better utilization of installed solar capacity. The system also enhances resilience under wind conditions through passive mechanical stability rather than continuous electrical correction.
Introduction
Conventional solar panels are largely static structures optimized for average sun positions rather than real-time solar alignment. While large solar farms employ tracking systems, these solutions are heavy, infrastructure-intensive, and unsuitable for modular rooftop or distributed applications. The hemispherical movable solar concept reimagines solar tracking at the unit level by allowing a mid-sized 300–400W panel to rest on a balanced fulcrum-like support capable of controlled orientation throughout the day. The central engineering challenge addressed is the selection of an actuation system that delivers reliable motion with minimal energy expenditure while maintaining long-term operational durability.
Unique Novelty
The uniqueness of the concept lies in shifting solar tracking from motor-driven positioning toward mechanically intelligent balance. Instead of relying on continuous electrical actuation, the system uses geometry, gravity balance, and self-locking transmission to maintain orientation without consuming holding power. The hemispherical support reduces multi-axis complexity, allowing smooth directional adjustment using small intermittent movements. Tracking becomes an occasional correction rather than continuous motion. This transforms the solar panel from a static energy collector into an adaptive energy node capable of autonomous positioning while remaining mechanically simple.
Technical Details
The recommended configuration operates within an optimal panel range of approximately 320–380W, corresponding to a structural mass of 22–30 kilograms. The panel is capable of elevation adjustments up to ±60 degrees and full directional alignment equivalent to azimuth tracking. Movement occurs intermittently at intervals of five to ten minutes, limiting daily actuation energy consumption to below 25 Wh.
Among evaluated actuation options, low-speed DC motors coupled with worm gear transmission emerge as the most efficient solution. Worm gear systems provide inherent self-locking capability, eliminating the need for continuous power during stationary periods and ensuring strong resistance against wind-induced displacement. Alternative solutions such as BLDC servo systems with mechanical locking brakes offer higher precision but at increased cost. Linear induction motors, although mechanically elegant, are inefficient at this scale due to continuous excitation requirements and insufficient passive holding torque.
A gravity-balanced linkage further reduces torque demand, allowing smaller motors and extending battery life. A compact battery buffer of approximately 50–100 Wh powers intermittent repositioning, while predictive sun-position algorithms reduce unnecessary movement. Wind detection mechanisms enable automatic stow positioning during extreme conditions, enhancing structural safety.
Originality
The originality of this approach lies not in introducing new solar cells or electronics, but in redefining the relationship between structure, motion, and energy consumption. Conventional trackers depend on stronger motors to overcome structural resistance. This design instead reduces resistance through balance and mechanical advantage. The motor effectively disappears into the system background, acting only as an occasional adjustment mechanism. The result is an energy-positive autonomous solar module that bridges the gap between fixed rooftop systems and large-scale tracking infrastructure. It represents a transition from infrastructure-heavy solar deployment toward modular intelligent energy units.
Roadmap for Implementation
Implementation can proceed through phased development beginning with mechanical prototyping of the hemispherical support and linkage assembly sized for a standard 350W panel. Initial validation should focus on torque requirements, wind stability, and actuation energy measurements under real operating conditions. Subsequent stages would integrate DC worm gear motor systems with embedded control electronics and predictive tracking software.
Pilot deployments on rooftops or microgrid installations can establish performance benchmarks against fixed-tilt systems. Manufacturing scale-up may leverage existing supply chains for solar modules, geared motors, bearings, and lightweight structural fabrication. Standardization around a modular unit enables clustering of multiple tracking nodes for residential, agricultural, and decentralized energy applications.
Over time, integration with smart microgrids and AI-based energy management systems can further reduce motion frequency and improve lifecycle efficiency. The long-term pathway positions the system as a scalable distributed solar platform suitable for urban rooftops, rural electrification, mobile infrastructure, and adaptive energy ecosystems.